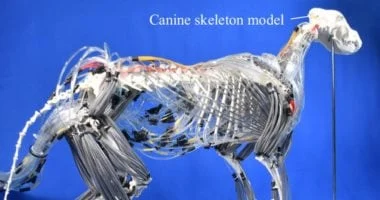
أعلن فريق من الباحثين عن تطوير نموذج روبوت كلب يعتمد على دراسة دقيقة لحركة الكلاب مع تركيز خاص على منطقة الكتف التي تتميز بمرونة كبيرة. تُعد هذه المنطقة عنصراً أساسياً في قدرة الكلاب على الجري والقفز والتعامل مع التضاريس الوعرة. تهدف هذه الدراسة إلى فهم التفاصيل الحيوية لحركة الكتف ثم استخدامها في تحسين تصميم الروبوتات الهندسية.
محاكاة كتف الكلب الروبوتي
اعتمد الباحثون على ذراع ميكانيكية تحاكي كتف الكلب وتقوم على امتصاص الصدمات وتوزيع القوى أثناء الحركة. يتيح هذا النظام إطاراً حيوياً يمنح الروبوت سلاسة في الحركة وتوازناً أعلى على مختلف أنواع الأرضيات. كما يُظهر التطبيق الأول أن المحاكاة تقلل الاهتزازات وتزيد من كفاءة الحركة مقارنة بالنماذج التقليدية.
تحسين المشي وتقليل الاهتزازات
من خلال محاكاة حركة الكتف الحيواني، تمكن الباحثون من جعل الروبوت أكثر ثباتاً أثناء المشي وبقدرة أوضح على الحفاظ على التوازن. يسهم الكتف المرن في تقليل الاهتزازات التي تؤثر على الأداء وتخفيف الإجهاد على الهياكل الآلية أثناء التنقل عبر تضاريس صعبة. ومن المتوقع أن تفتح هذه التقنية الباب أمام استخدامات أوسع في بيئات تتطلب موازنة دقيقة وتنقلاً آمناً في مواقع خطرة.
آفاق جديدة في الروبوتات المستوحاة من الطبيعة
أشار الباحثون إلى أن الاعتماد على الطبيعة في تصميم المفاصل والأطراف يمكن أن يغير مستقبل الروبوتات ويعزز قدرتها على تقليد الحركة الحيوية. يمكن أن تتيح النماذج المحاكاة تنفيذ مهام مثل عمليات البحث والإنقاذ والتنقل في الأماكن الضيقة والوعرة. تؤكد النتائج أن فهم التفاصيل الدقيقة لحركة الحيوانات يقرب الروبوتات من الحركة الطبيعية للكائنات الحية أكثر من أي وقت مضى.